- Europa
- Amerika
- Asien und Mittlerer Osten
- Afrika und Ozeanien
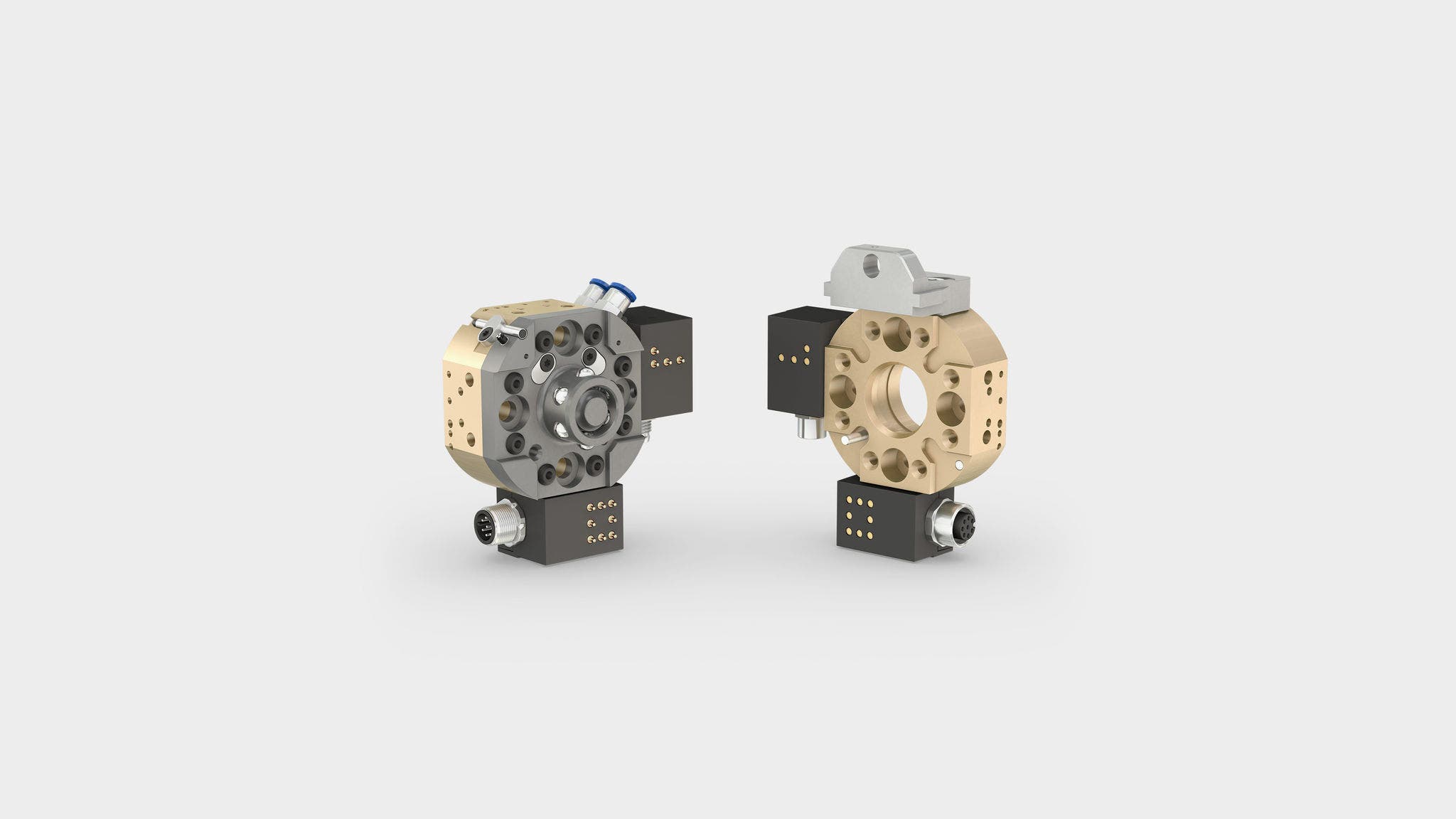
Der MPS 025 ist ein kompaktes und zuverlässiges Roboter-Werkzeugwechselsystem, das für Anwendungen mit geringer Nutzlast entwickelt wurde. Mit einer Traglast von bis zu 20 kg bietet dieser automatische Werkzeugwechsler eine beeindruckende Präzision mit einer Wiederholgenauigkeit von +/- 0,0015 mm und die Fähigkeit, maximale statische Momente von bis zu 70 Nm und 255 Nm dynamisch zu bewältigen.
Der Flansch des Roboteradapters hat einen Teilkreisdurchmesser von 40 mm, wodurch er mit einer Vielzahl von Robotern und kleinen Traglasten kompatibel ist. Das MPS 025 ist für den Betrieb in rauen Umgebungen mit einem Betriebsdruckbereich von 0,45 - 1,0 MPa und einem Betriebstemperaturbereich von 0°C bis +50°C ausgelegt.
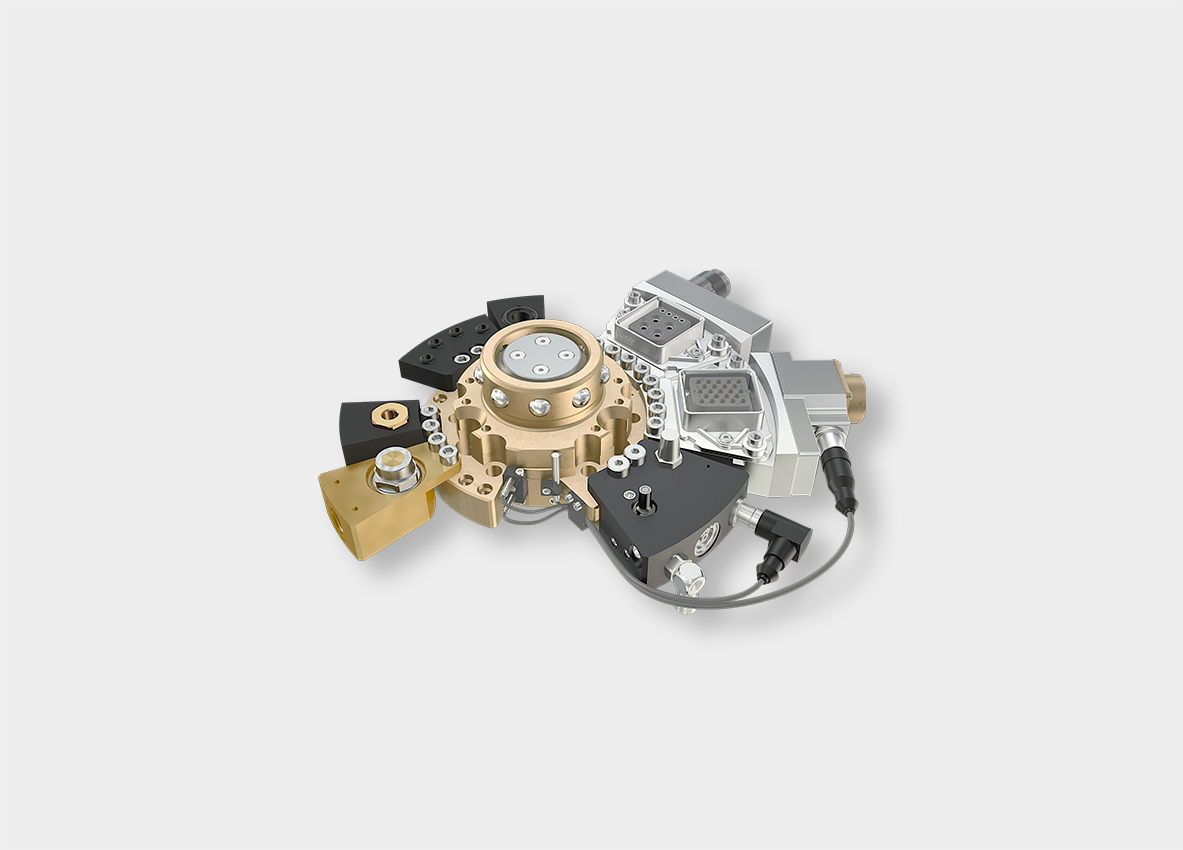
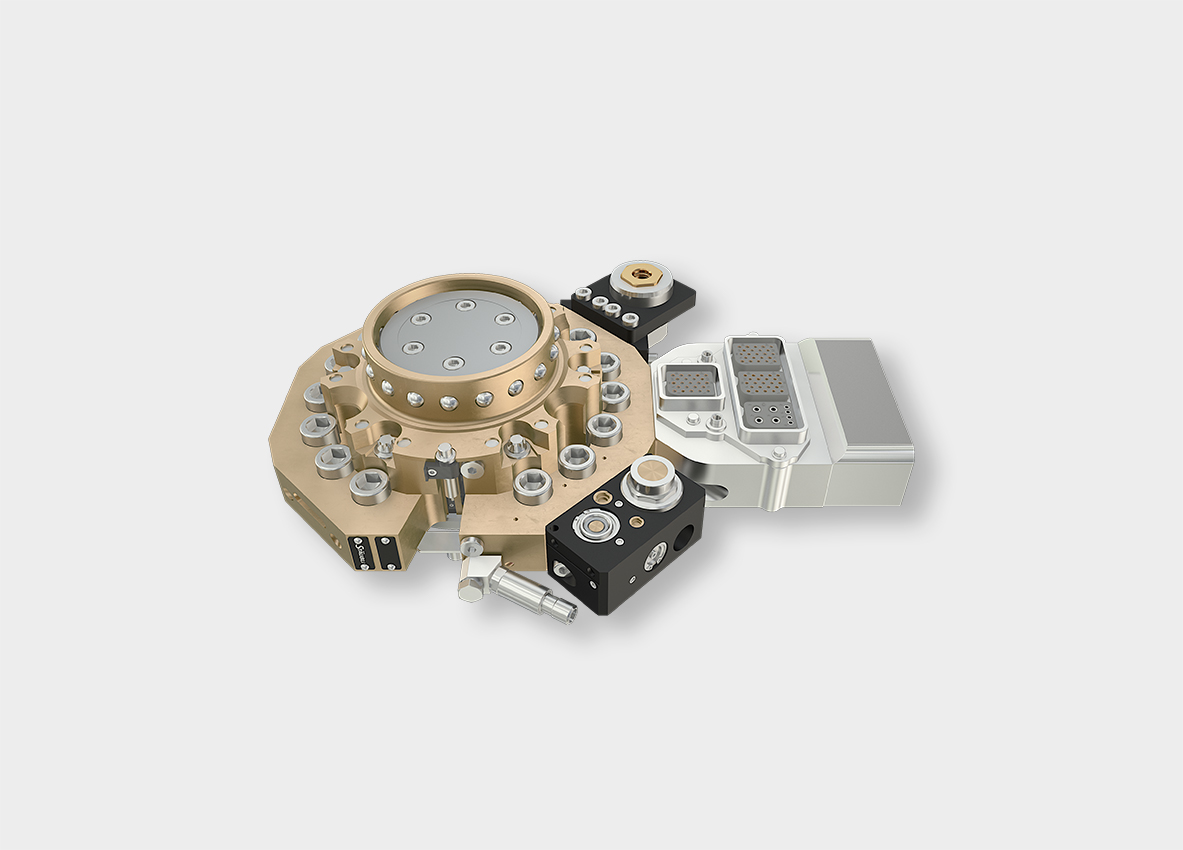
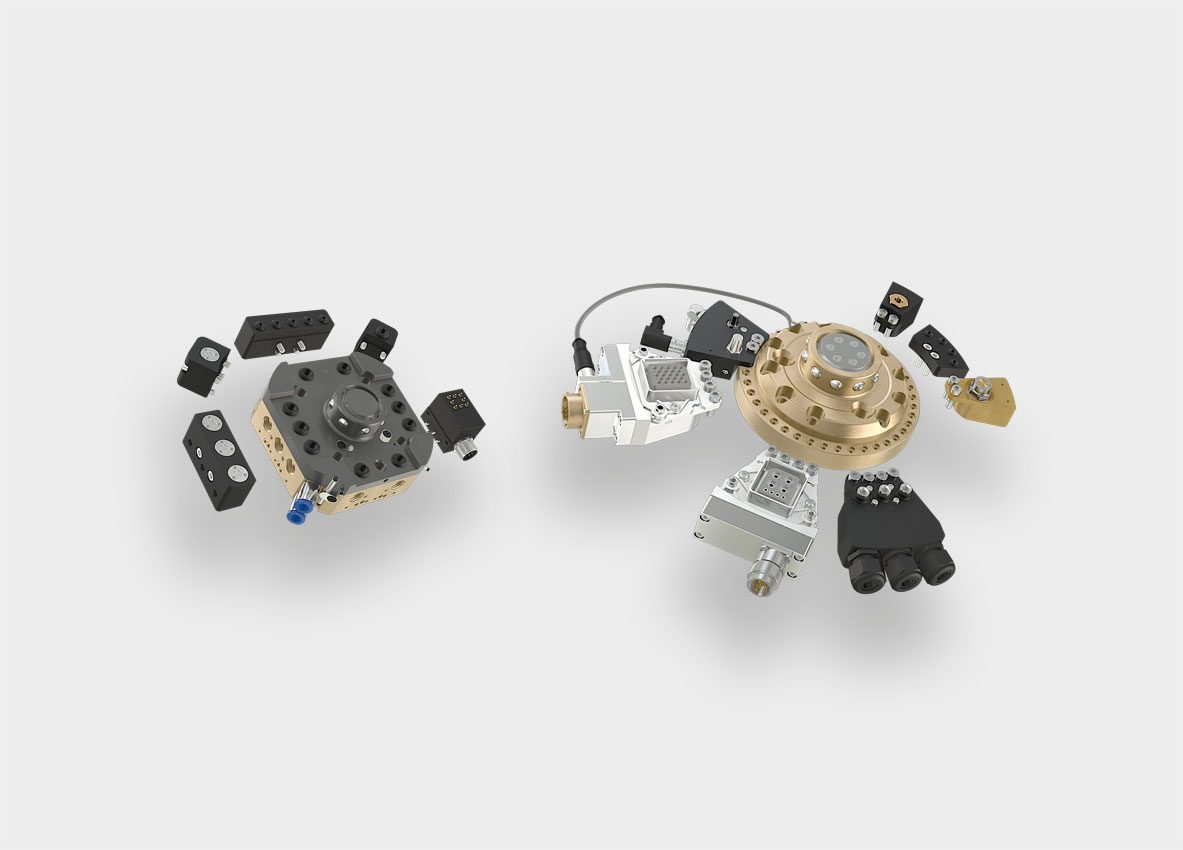
Das Roboter-Werkzeugwechselsystem ist hochflexibel und verfügt über zahlreiche Modulvarianten für verschiedene Medien-, Daten- und Energieübertragungskomponenten, wie z.B. Pneumatik, Vakuum und Kühlung, Signal- und Energieversorgung. Durch seine kompakte und modulare Bauweise lässt es sich zudem leicht an spezifische Anwendungsanforderungen anpassen. Der Stäubli MPS 025 bietet eine bemerkenswerte Präzision und Zuverlässigkeit, was es zur idealen Wahl für verschiedene Anwendungen mit kleinen Traglasten macht, die eine Automatisierung des Werkzeugwechselprozesses erfordern.

Wiederholgenauigkeit:
+/- 0.0015 mm

Traglast:
up to 20 kg

Max. statisches Moment:
34 Nm

Modulplätze:
4
Ob Ihre Projekte individuelle und umfassende Anforderungen haben oder eine schnelle Lösung benötigen. Dank des modularen Produktkonzepts von Stäubli Roboter-Werkzeugwechslern können alle komplexen Anforderungen schnell angewendet werden.
| MPS 025 | |
| Traglast | 20 kg |
| Max. statisches Moment (Mx/My) | 34 Nm |
| Max. statisches Moment (Mz) | 34 Nm |
| Max. dynamisches Moment (Mx/My) | 119 Nm |
| Max. dynamisches Moment (Mz) | 119 Nm |
| Betriebsdruck | 0.45 - 1.0 MPa |
| Betriebstemperatur | 0 °C - +50 °C |
| Wiederholgenauigkeit | +/- 0.0015 mm |
| Bauhöhe (gekuppelt) | 46 mm |
| Befestigungsteilkreis Roboterflansch | ISO 9409-1-40-4-M6 |
| Anzahl Modulplätze | 4 |


Das System für Personen und Anlagensicherheit.