- 欧洲
- 美洲
- 亚洲和中东
- 非洲和大洋洲
现如今,钻孔和铣削属于机器人的标准应用。但如果无法保证某些预定义参数,例如工件装夹不当,该当如何?“Dinamtrack 系统”为此提供了一个令人叹服的解决方案。
西班牙集成商 eProject4 采用了一种用于金属加工的创新型自动化解决方案。“Dinamtrack”系统实现了复杂部件的图像控制加工。3D 扫描仪、机器人和 CNC 控制器之间通过史陶比尔 uniVAL drive 接口进行数据实时交换。
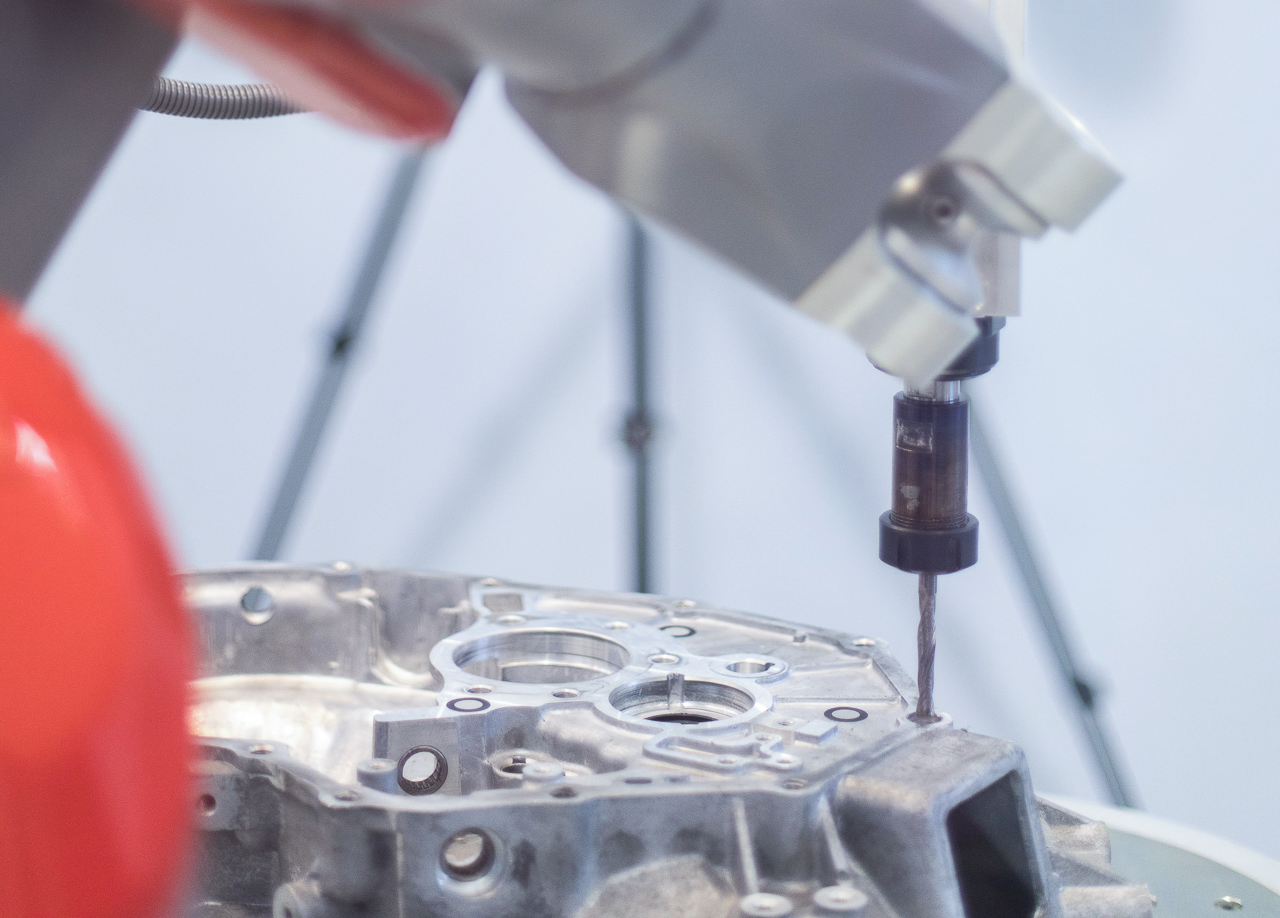
"Dinamtrack" 项目涉及齿轮箱外壳中的自动化钻孔。项目预期是在生产条件与初始规范不相符的情况下,也能实现生产流程完全自动化。也就是说,即使对变速箱壳体零件的装夹操作有误,也能精准钻孔。
借助 3D 图像处理系统才能实现这一点,此系统用于监控该过程,并向控制器提供实际数据,以便根据不同情景作出处理。因此机器人必须拥有一双“慧眼”。为此,齿轮箱外壳必须贴上扫描仪可识别的标记点。
eProject4 为“Dinamtrack”系统创设了这些先决条件 - 同时还满足了其他两个基本条件。机器人必须以高精度工作。这就是使用 TX 系列史陶比尔机器人(本案例中为 TX60)的原因。必须确保扫描仪、CNC 控制器和机器人控制器之间的直接实时连接。这一要求可利用史陶比尔独特的uniVAL drive 接口满足。
在查看加工过程时,“Dinamtrack”的优势尽显。机器人由3D扫描仪监控和控制,对待加工螺纹的孔进行检测。如果齿轮箱外壳没有平放在工件架上,机器人根据来自 3D 扫描仪的数据识别错位,并将钻头移到一个倾斜位置,从而精确(即垂直)钻孔。因此,钻头会主动适应传感器所检测到的单个工件具体位置。
这一点之所以能实现,是因为3D 测量会将工件的实际位置与控制器中保存的 3D 模型进行对比,然后机器人控制器会获取“偏移量”作为输入值,机器人在工具定位和加工时会自行考虑该“偏移量”。
如果没有实时的 uniVAL drive 接口,就无法将机器人控制器、CNC 控制器和扫描仪控制器进行组合。因此据 eProject4 所言,也可以利用更大型的机器人实施 "Dinamtrack" 项目,但只能选择带 uniVAL drive 接口的史陶比尔机器人,例如 TX200。
拥有“慧眼”的机器人为加工过程赋予了灵活性。尤其在加工复杂零件时,独具优势。除了独特的控制方案,高精度和动态性同样是使用史陶比尔机器人的优势所在。eProject4觉得与西班牙史陶比尔子公司合作是另一个优势点,其员工提供了高度专业化的操作,特别是在通过 uniVAL drive 将西门子 CNC 控制器连接机器人方面。