- Europe
- Amériques
- Asie et Moyen-Orient
- Afrique et Océanie
Dans le domaine de la robotique, on appelle outils de préhension les appareils fixés au bras du robot qui accomplissent un travail physique ou interagissent avec leur environnement. On retrouve par exemple : les systèmes de préhension, les ventouses, les dispositifs de soudage, etc…
Dans la robotique moderne, on utilise le terme générique de solutions de préhension (End-of-Arm-Tooling – EOAT) pour regrouper ces outils. Les solutions de préhension sont d’une importance capitale dans l’industrie manufacturière de par leur contribution décisive à l’automatisation des processus de fabrication. Cela permet d’exploiter pleinement le potentiel de la robotique moderne.
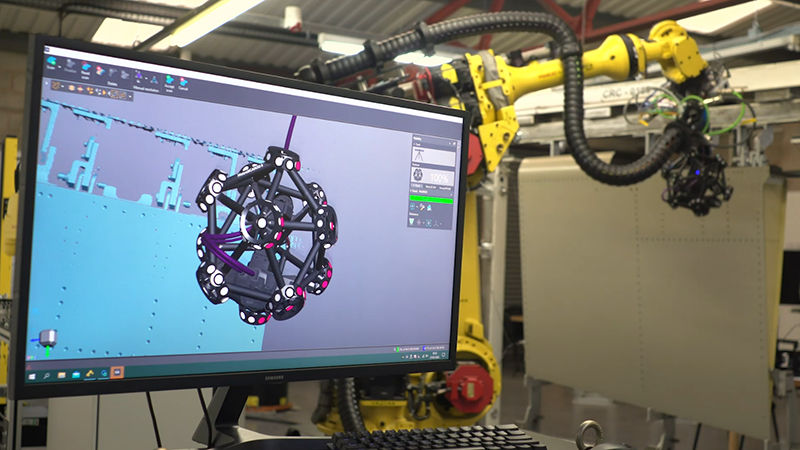
La robotique n’a cessé d’évoluer au fil de ces dernières années. L’image du vigoureux robot industriel cantonné aux travaux nécessitant une force importante, comme le transport de pièces lourdes, est depuis longtemps révolue. Des systèmes robotisés modernes et de hautes précisions qui s’intègrent parfaitement dans les processus de fabrication automatisés sont désormais en place.
Les solutions de préhension ont eu un impact déterminant dans cette étape de développement. En effet, elles déploient pleinement leur potentiel dans le rôle d’interface entre le robot et l’objet à travailler. Cela permet ainsi d’exploiter pleinement le potentiel de l’automatisation des processus. L’homme se retrouve déchargé de ces tâches qui demandent tant de force et de temps, tandis que la vitesse, l’efficacité et la précision de l’ensemble du processus de fabrication s’en retrouvent multipliées. Grâce à ces avantages, les entreprises peuvent réaliser des réductions de coûts significatives en ayant recours à des outils de préhension. Parmi les effets secondaires importants, citons que l’utilisation de robots réduit le risque d’erreurs de fabrication ainsi que le nombre d’accidents de travail.
L’utilisation d’outils de préhension renvoie à de nombreux avantages dans l’industrie de la fabrication et de l’automatisation. Parmi ces avantages, on retrouve :

À l’origine, on a développé les robots pour les tâches dangereuses et qui exigent une force herculéenne, mais leur principal avantage dans le contexte de l’industrie 4.0 est surtout manifeste dans l’amélioration de la productivité des processus de fabrication automatisés. Les appareils équipés d’EOAT y jouent un rôle clé, car seul un embout d’outillage adéquat permet une interaction physique avec l’objet. Les outils de préhension fonctionnent de manière extrêmement efficace, avec grande précision et sans la moindre erreur : il en découle une productivité significativement plus élevée qui s’accompagne de temps de cycle réduits.
Le recours aux EOAT assure une meilleure qualité du travail, tout particulièrement dans le cadre d’opérations répétitives comme la préhension, le positionnement, le vissage, le perçage ou le soudage. Les robots industriels modernes sont en mesure de travailler avec une grande précision et sans commettre d’erreurs. Il en résulte ainsi une réduction non négligeable des rebuts produits, ce qui a par ailleurs un impact positif sur l’efficacité des matériaux ainsi que sur le bilan environnemental de l’entreprise. En outre, la robotique contribue à alléger la charge de travail de l’assurance qualité de manière considérable.
Du point de vue de la stratégie d’entreprise, l’investissement dans des outils de préhension modernes est rentable du fait de la réduction significative des coûts du processus de production. Comparés à un travail réalisé manuellement, les robots travaillent certes plus précisément et sûrement, mais aussi, et surtout, beaucoup plus rapidement. Cela permet de consacrer les ressources humaines à des activités plus complexes grâce à la robotique, réduisant ainsi considérablement les coûts de main-d’œuvre.
Les outils de préhension sont aussi connus sous le nom d’effecteur terminal (ou effecteur de robot) et comprennent une large gamme d’équipements de processus. Outre les outils pour la manipulation des pièces, tels que les préhenseurs ou les ventouses, on trouve aussi des outils pour une exécution automatisée des procédés de fabrication, par exemple le perçage, le vissage ou le soudage. Par ailleurs, on compte les capteurs tels que les capteurs de collision ou les capteurs de couple également parmi les outils de préhension.
Un bref aperçu des principaux outils de préhension utilisés dans la manutention est présenté ci-dessous.
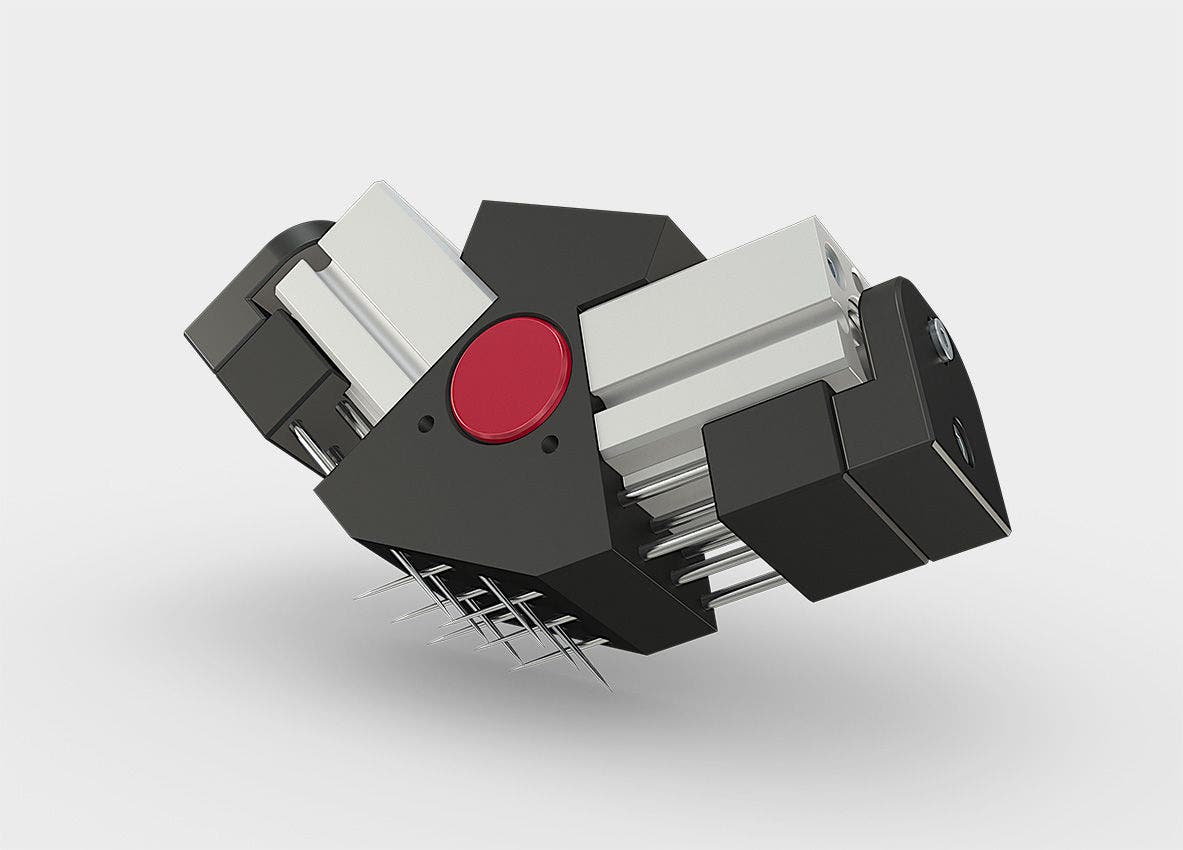
Les préhenseurs robotiques (« grippers ») sont un des grands classiques parmi les outils de préhension et sont utilisées dans un grand nombre de processus de fabrication automatisés. Dans le processus de fabrication, la technique de préhension permet de saisir, de transporter, de positionner et d’assembler divers composants avec la plus grande précision. Ils sont capables de prélever et de déposer avec autant de sécurité que de douceur toutes sortes de composants, des plus petits aux plus imposants. Les préhenseurs pour robots peuvent être adaptés selon les caractéristiques de la pièce en question. Par exemple, les préhenseurs angulaires sont en mesure de saisir des composants présentant des contre-dépouilles en toute sécurité, tandis que les préhenseurs à aiguilles sont bien adaptées aux matériaux qui ne peuvent être ni aspirés ni saisis.
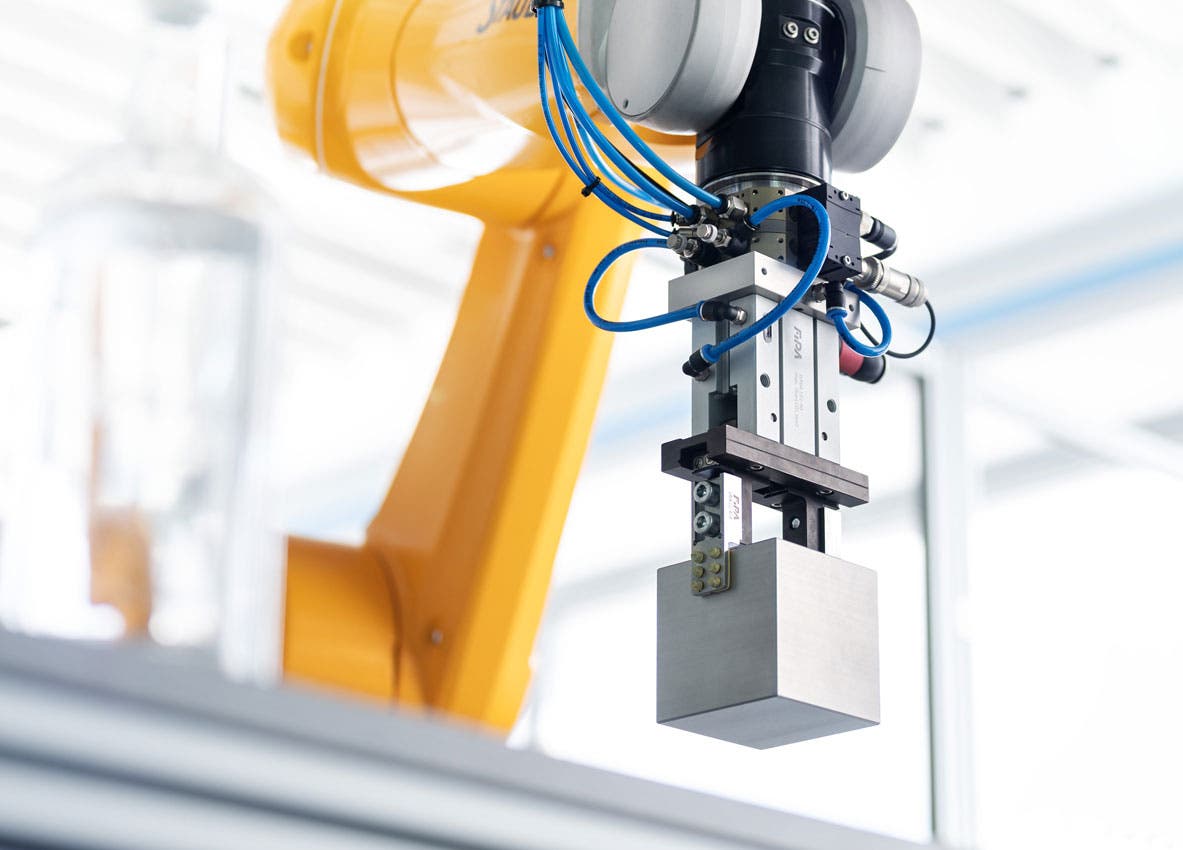
Les préhenseurs parallèles : Les préhenseurs parallèles sont des systèmes de préhension dotés de deux ou plusieurs mors parallèles qui permettent de saisir l’objet. Les préhenseurs parallèles doivent leur popularité à leur simplicité de construction et à leur polyvalence. Ce système de préhension se prête parfaitement aux applications EOAT qui nécessitent une force de préhension élevée.
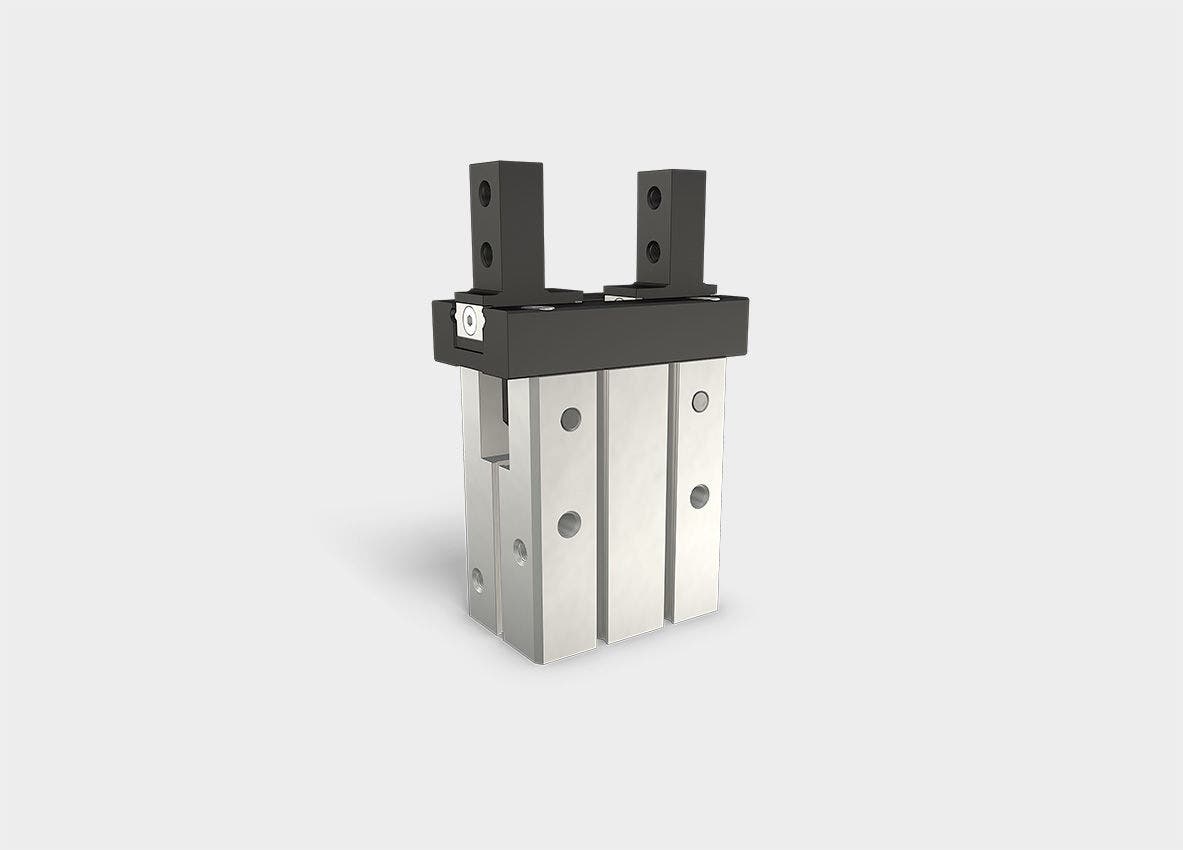
Les préhenseurs angulaires : Les préhenseurs angulaires sont capables de saisir des composants selon un angle défini. Dans ce système de préhension, les mors ne sont donc pas parallèles, mais convergents. Ils peuvent ainsi saisir des composants au niveau des contre-dépouilles ou de serrer des composants.

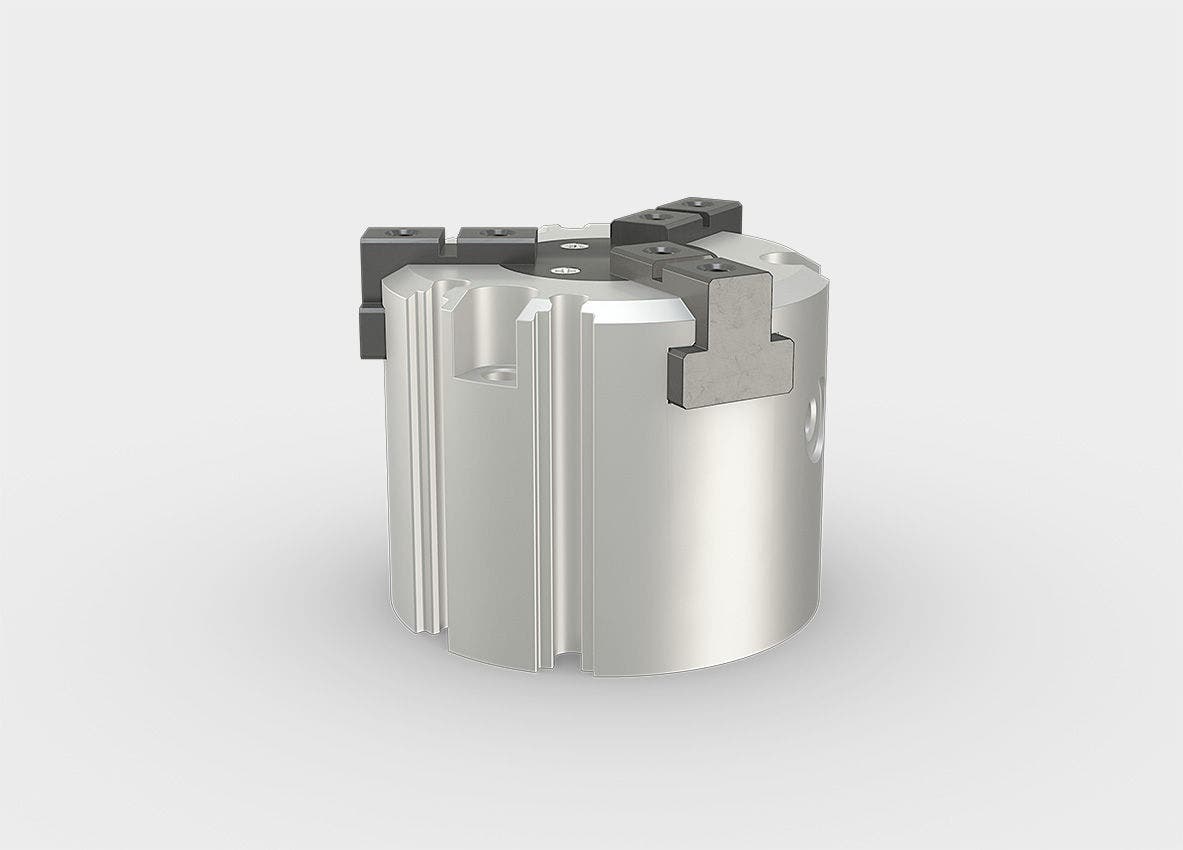
Les préhenseurs à trois doigts : Le préhenseur à trois doigts est capable de saisir des composants sur trois points de contact, ce qui permet une prise et une dépose des plus précises et des plus stables. Cette technique de préhension est typiquement utilisée dans la manipulation de pièces rondes.
Les préhenseurs à aiguilles : Les préhenseurs à aiguilles sont utilisés pour saisir des objets fragiles, difficiles à aspirer ou encore poreux, sans mettre en péril le processus. Un préhenseur à aiguilles est composé de plusieurs aiguilles qui peuvent s’ouvrir et se fermer afin de saisir un objet en toute sécurité. Ce type de préhenseur est souvent utilisé dans l’industrie textile et l’industrie électronique pour manipuler des matériaux fragiles tels que les tissus, les matériaux composites à base de fibres, les circuits imprimés ou encore les câbles.
Les préhenseurs internes : Les préhenseurs internes sont des effecteurs terminaux qui peuvent saisir et tenir les objets de l’intérieur. Un préhenseur interne se compose de mors ou de soufflets de préhension spéciaux, capables de s’ouvrir et de se fermer ou bien de se dilater sous l’effet de la pression de service. On parvient ainsi à enclaver l’objet de l’intérieur et à le serrer. En général, on a recours aux préhenseurs internes pour saisir et déplacer des corps creux cylindriques ou rectangulaires, comme des tubes.

Pour choisir le préhenseur le plus adéquat, un généreux portefeuille de différents types de préhenseurs est mis à la disposition des utilisateurs. Des outils de préhension adaptés sont disponibles pour répondre à la grande majorité des besoins des clients.

La technologie du vide fait partie intégrante de la robotique moderne. Les ventouses à vide, comme les pinces de préhension, sont principalement utilisées pour saisir et déplacer des objets. Un ou plusieurs canaux se chargent de générer une force de succion en mesure de saisir l’objet sur le support sous l’effet du vide, du fait que leurs formes s’épousent parfaitement.
Les préhenseurs réflexes pour robots peuvent être dotés soit de mors plats soit de soufflets et on les utilise pour des tâches de manutention de toutes sortes. Parmi leurs emplois typiques, on compte la manipulation de tôle ou de verre, la prise de cartons souples ou pliables dans l’industrie de l’emballage ou le traitement de produits alimentaires.
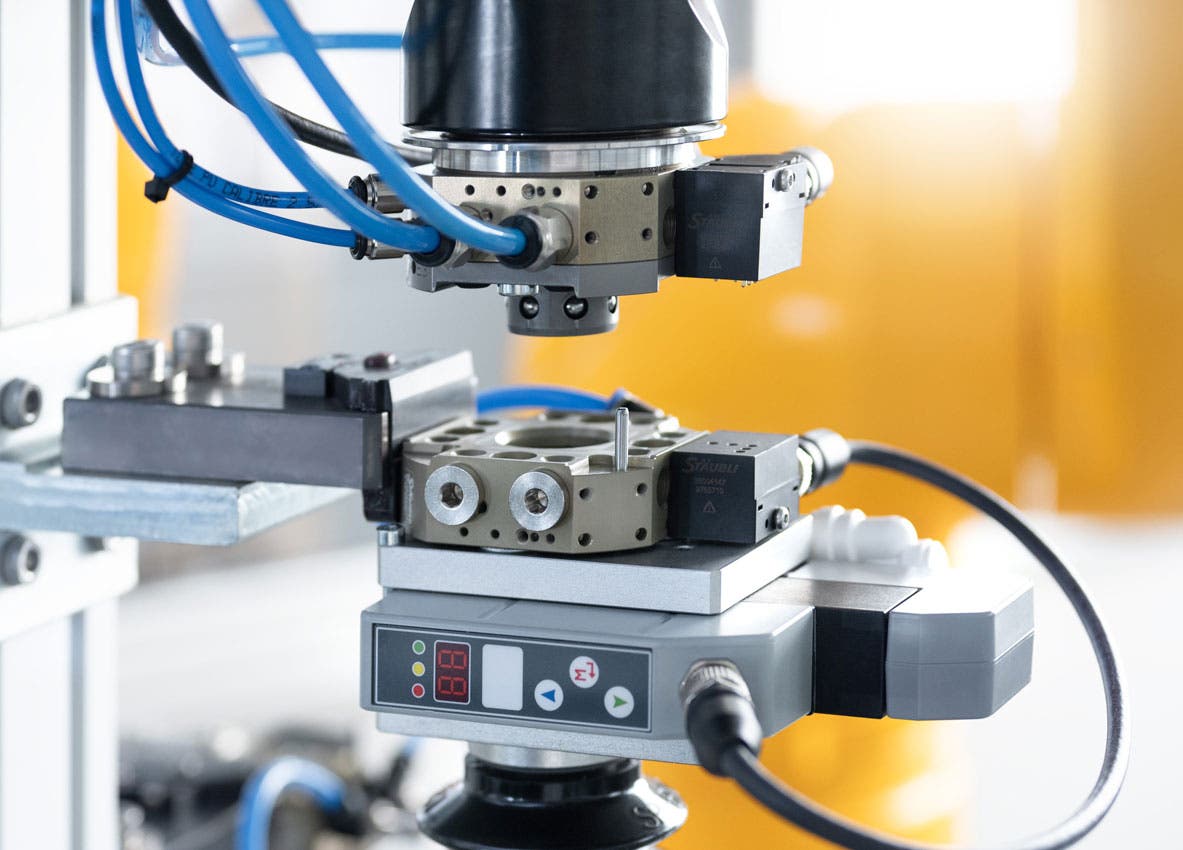
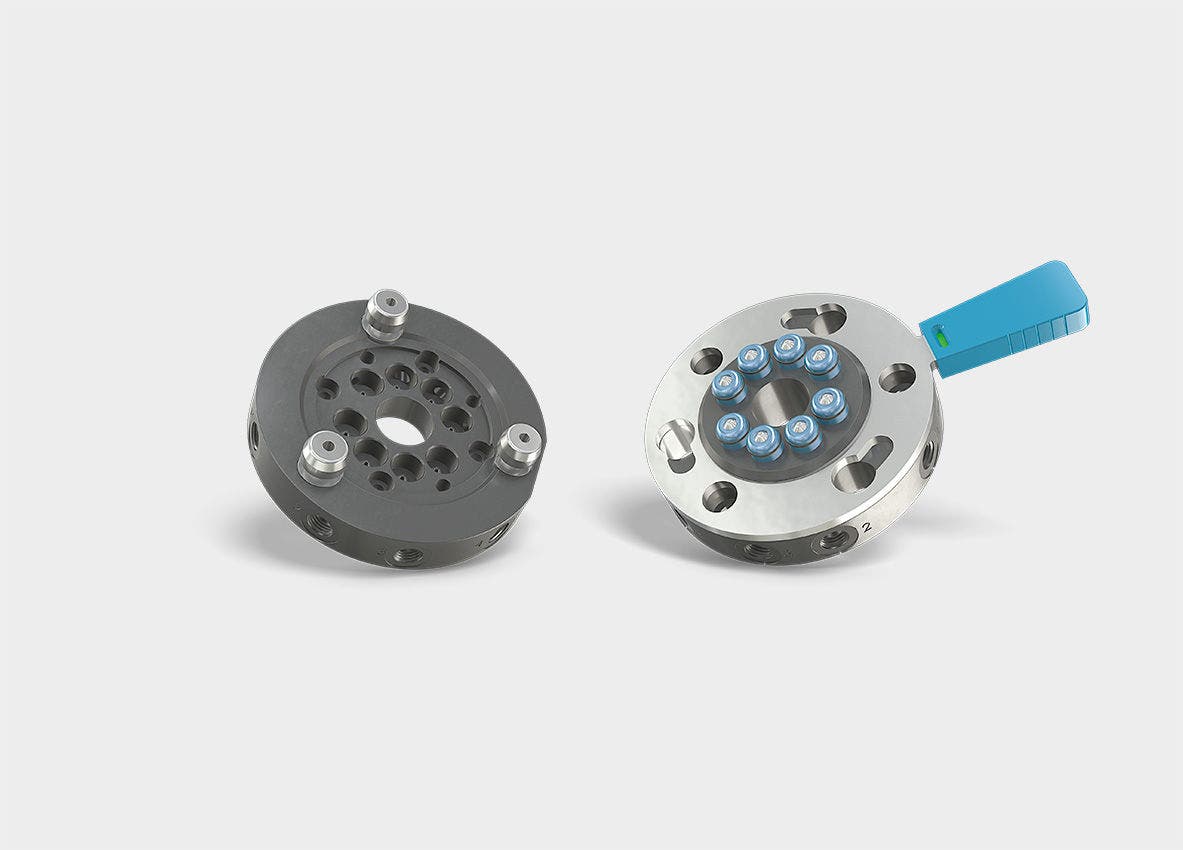
Les changeurs d’outils permettent de changer rapidement un effecteur terminal de robot pour un autre. Un système de changeurs d’outils EOAT peut être soit manuel soit automatique. Les systèmes de changeurs d’outils permettent un champ d’utilisation des robots considérablement plus important. Ils sont donc surtout répandus dans les utilisations robotiques où de nombreuses activités différentes se succèdent.
Les changeurs d’outils se situent à l’interface entre le poignet (la bride) du robot et l’effecteur terminal. Ils doivent donc pouvoir être adaptés avec précision à la fois aux exigences du robot et à celle de l’outil. Par ailleurs, les changeurs d’outils servent à transmettre des signaux électriques, des données, de l’eau, de l’air comprimé ou encore la force de soudage et la force servo.
Les systèmes de changeurs d’outils automatiques : Les « Automatic Robotic Tool Changers » (ATC) permettent de passer automatiquement d’un effecteur terminal à un autre. On parvient ainsi à augmenter le degré d’automatisation et à accroître la productivité, tout en réduisant les frais de main-d’œuvre. Le système de changeurs d’outils automatique se révèle surtout utile lorsque les outils doivent être changés fréquemment au cours du processus.

Les systèmes de changeurs d’outils manuels : Lorsque le remplacement de l’effecteur terminal n’est nécessaire que de manière occasionnelle et que l’espace disponible pour une station de déchargement est limité, on peut tout à fait envisager de se tourner vers un système de changeurs d’outils manuel. Dans ce cas, la connexion entre le robot et le préhenseur se fait à la main. Grâce à des modèles standardisés, le changement d’outil est réglé en un temps record.
Dans de nombreux secteurs, notamment dans l’industrie automobile, on fait appel aux robots pour des tâches de soudage. L’utilisation de solutions EOAT permet d’automatiser le processus de soudage en grande partie, permettant des soudures de haute qualité réalisées en un temps de cycle moindre. Les applications EOAT sont souvent utilisées pour les procédés de soudage par points.
Les solutions EOAT ne se limitent pas à une manipulation mécanique de composants ; elles sont également très répandues pour des tâches relevant de l’inspection et du contrôle qualité. Par exemple, on peut utiliser des caméras, des capteurs à ultrasons, des capteurs infrarouges, des scanners laser ou tout autre système similaire pour une inspection des composants.
Les outils de préhension sont également utilisés pour l’usinage, principalement dans les secteurs de la métallurgie et de la plasturgie. Les utilisations typiques qu’on en fait comprennent le perçage, la découpe, le chanfreinage ou le meulage de composants.
Différents aspects techniques et économiques doivent être pris en compte au fil du développement, de la mise en œuvre et de l’exploitation d’outils de préhension pour les systèmes robotiques. Cela inclut notamment les défis suivants :
La conception de systèmes EOAT modernes exige une compréhension pointue de la robotique, surtout pour les applications qui demandent une précision ou une vitesse importante. Il s’agit là d’adapter l’outil de préhension à l’application avec minutie, en tenant compte des contraintes de poids et de forme des composants, de la technique d’entraînement et de commande, des limitations spatiales et bien d’autres aspects encore.
La mise en œuvre de solutions EOAT est synonyme de coûts considérables – selon le cas de figure. Avant d’investir dans des outils de préhension, procéder à un calcul détaillé de la rentabilité potentielle est de mise. Les gains en termes de chiffre d’affaires grâce à une efficacité accrue et de la réduction des besoins en main-d’œuvre doivent être mis en équation avec les coûts initiaux et les frais généraux que la mise en œuvre des solutions EOAT implique.
Les systèmes EOAT se composent d’un nombre de pièces mobiles important qui suivent un processus d’usure naturel. Lors de l’intégration d’outils de préhension dans le processus de fabrication, il faut donc veiller à choisir des composants à faible usure que l’on peut remplacer rapidement si nécessaire. Cela permet ainsi de réduire les frais d’entretien et de maintenance à leur minimum.
L’intégration d’outils de préhension dans un système robotique et un environnement de production doit être gardée en tête dès la phase de conception, le but étant de coordonner soigneusement chacun des sous-systèmes et de veiller à leur compatibilité. L’intégration du système touche aussi bien les paramètres mécaniques du bras du robot, du changeur d’outils et des EOAT que les spécifications logicielles et de commande.
Lors de l’implémentation d’outils de préhension, l’aspect sécuritaire est primordial. Cela vaut tout particulièrement pour les systèmes collaboratifs, dans lesquels les personnes et les robots travaillent ensemble. Le but premier est donc de prendre les mesures de sécurité nécessaires pour éviter tout accident professionnel. Cela peut prendre la forme de capteurs pour la surveillance des processus ou encore de dispositifs d’arrêt automatique.
Thanks to their many benefits, EOAT systems have become a mainstay of the manufacturing industry. Modern robot end effectors not only make it possible to design manufacturing processes with greater precision and efficiency, they also noticeably increase industrial safety and product quality standards. In a globalizing economic environment, EOAT holds the potential to sustainably improve your competitiveness in production.
Implementing versatile, flexible EOAT solutions makes it possible to tune production processes to new requirements quickly, and exploiting the principle of modularity will allow you to make maximally efficient use of available robotic systems. For example, a single robot can complete a wide range of tasks without human intervention, thanks to a suitable tool changer and end-of-arm tools.
Modern robotic systems with EOAT solutions today are showing off their strengths in numerous applications. These include assembly, material handling, feeding and unloading machines, as well as picking, packing, palletizing, welding, and drilling components.
Le thème des EOAT vous intéresse ? Alors, n’hésitez pas à nous contacter.

Pour améliorer l'efficacité de votre production ou pour concevoir un système robotisé plus efficace, notre site EOAT contient les informations et les ressources dont vous avez besoin. Explorez-le et découvrez toutes les façons dont vous pouvez exploiter la puissance de l'EOAT pour progresser dans votre domaine.
Pionnier dans la conception et la fabrication de systèmes de changement d’outils pour robots haute technologie.