- Europe
- Americas
- Asia and Middle East
- Africa and Oceania
En robótica, las herramientas de fin de brazo se refieren a equipos conectados al brazo del robot que realizan un trabajo físico o interactúan con el entorno. Ejemplos típicos de este tipo de herramientas son los sistemas de pinzas, las herramientas de vacío, las herramientas de soldadura o equipos de proceso similares.
La robótica moderna agrupa herramientas como esta bajo el término general de "End-of-Arm-Tooling" (EOAT). Las herramientas de fin de brazo son cruciales en la industria manufacturera, ya que contribuyen en gran medida a la automatización de los procesos de fabricación. EOAT permite explotar todo el potencial de la robótica de vanguardia.
La robótica ha evolucionado continuamente en los últimos años. El estereotipo del voluminoso robot industrial que "hace el trabajo pesado" (de piezas pesadas, por ejemplo) ya no refleja la realidad. En su lugar, los modernos sistemas robóticos de alta precisión que pueden integrarse sin problemas en los procesos de producción automatizados.
Las herramientas de fin de brazo han desempeñado un papel clave en esta evolución: en la interfaz entre el robot y el objeto manipulado se encuentran las herramientas que realmente le dan al robot toda su gama de capacidades. Solo así es posible explotar todo el potencial de la automatización de procesos.
Esto elimina la necesidad de que los humanos realicen tareas que requieren mucha mano de obra y mucho tiempo, lo que resulta en una mayor velocidad, eficiencia y precisión en todo el proceso de fabricación. Mediante el uso de herramientas de fin de brazo, las empresas no solo logran importantes ahorros de costos, sino que el uso de robots también reduce el riesgo de defectos de fabricación y accidentes laborales.
En la industria de la fabricación y la automatización, el uso de herramientas de fin de brazo aporta beneficios de gran alcance. Algunos de estos beneficios incluyen:

Los robots se diseñaron originalmente principalmente para tareas pesadas y peligrosas, pero en un contexto de Industria 4.0, su principal beneficio radica en las enormes ganancias de productividad de los procesos de fabricación automatizados. Los dispositivos de proceso EOAT disfrutan de otro papel clave aquí, ya que se requiere el inserto de herramienta adecuado para interactuar físicamente con el objeto. Las herramientas de fin de brazo funcionan con precisión, con la máxima eficiencia y cero errores, lo que se traduce en una productividad mucho mayor con tiempos de ciclo más bajos.
Las soluciones EOAT garantizan una mayor calidad, especialmente en el caso de pasos de trabajo repetitivos como agarre, posicionamiento, atornillado, taladrado o soldadura. Los robots industriales modernos son capaces de trabajar con alta precisión y cero errores. El resultado: un número significativamente menor de rechazos, lo que también es una bendición para la eficiencia de los materiales y la huella medioambiental de la empresa. Además, la robótica también alivia una gran cantidad de tensión de los hombros de la división de control de calidad.
Desde un punto de vista estratégico de alto nivel, la inversión en herramientas modernas de fin de brazo se amortiza con creces, gracias al importante ahorro de costes en el proceso de producción. A diferencia del trabajo manual, los robots no solo son más seguros y precisos en su trabajo, sino que también son mucho más rápidos. La robótica permite reequilibrar los recursos de personal para tareas más complejas, o reducir directamente los costes de personal.
Las herramientas de fin de brazo también se conocen como efectores finales robóticos. Comprenden un amplio espectro de dispositivos de proceso. Además de las herramientas para manipular piezas, como pinzas o extremos de vacío, también existen herramientas que llevan a cabo pasos de fabricación totalmente automatizados, como taladrar, atornillar o soldar. Las herramientas de fin de brazo también incluyen sensores como sensores de colisión o sensores de par.
A continuación, presentamos algunas de las herramientas de fin de brazo más importantes en el área de manipulación de materiales.
Las pinzas son una herramienta clásica para el extremo del brazo. Se utilizan en numerosos procesos de fabricación automatizados. La tecnología de pinzas permite recoger, transportar, posicionar y ensamblar componentes con precisión en los procesos de fabricación. Los componentes pequeños o incluso muy grandes se pueden recoger y volver a colocar de forma segura. Las pinzas robóticas se pueden personalizar según las características del componente en cuestión. Por ejemplo, las pinzas angulares pueden recoger de forma segura piezas más gruesas en la parte delantera que en la trasera; Y las pinzas de agujas son especialmente adecuadas para materiales que no se pueden recoger al vacío ni agarrar.
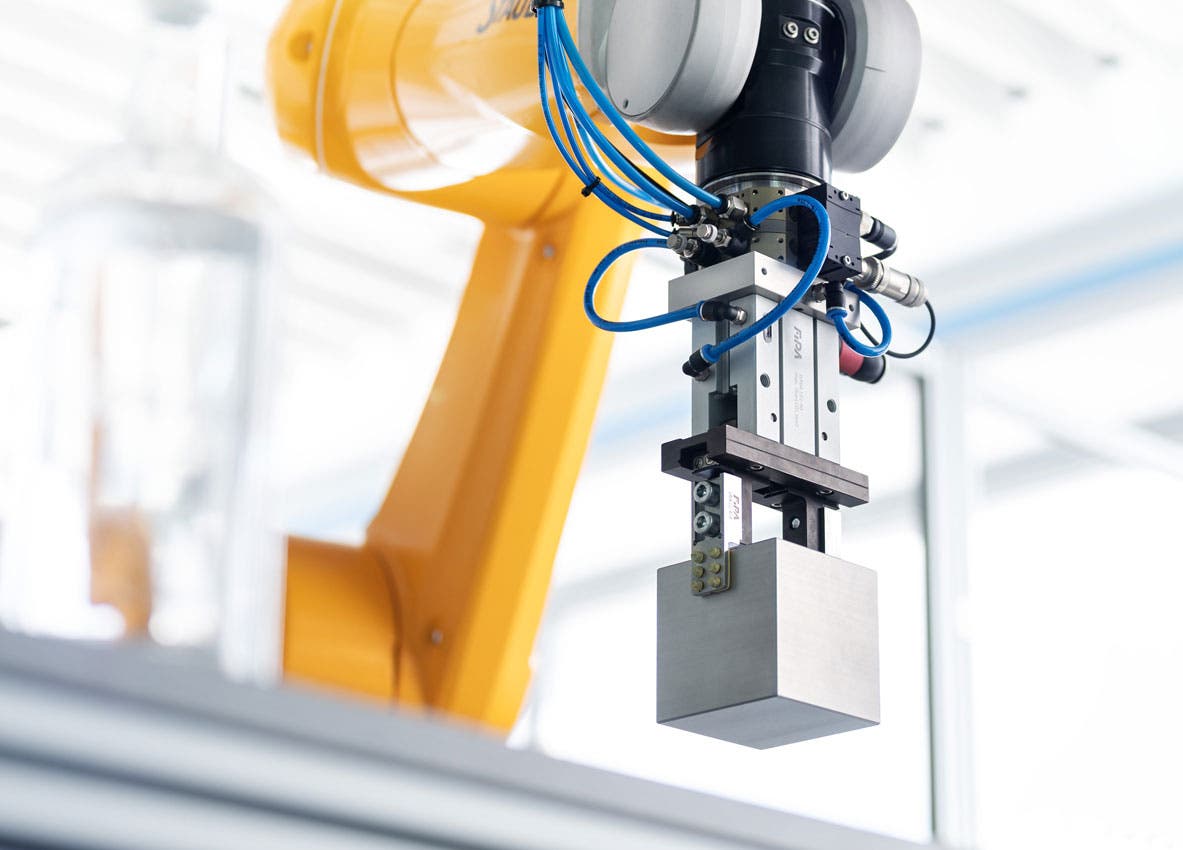
Las pinzas paralelas son sistemas de pinzas con dos o más mordazas paralelas que sujetan el objeto. Las pinzas paralelas son populares principalmente por su construcción simple y su aplicación versátil. Este sistema de pinza es una zapata para aplicaciones EOAT que requieren una gran fuerza de agarre.
Las pinzas angulares son capaces de agarrar componentes en un ángulo definido. Las mordazas de este tipo de sistema de pinzas no son paralelas, sino que están inclinadas. Esto permite agarrar componentes que son más delgados hacia atrás o sujetar componentes.

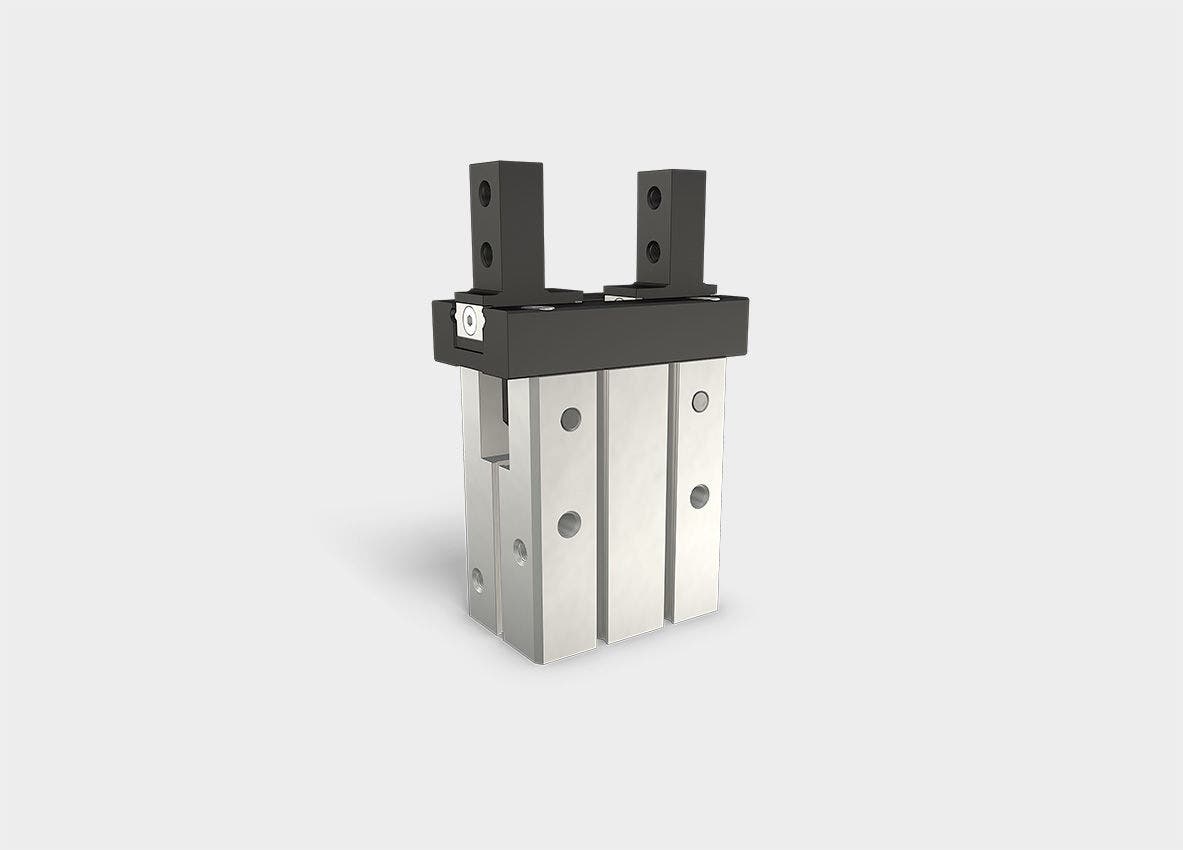
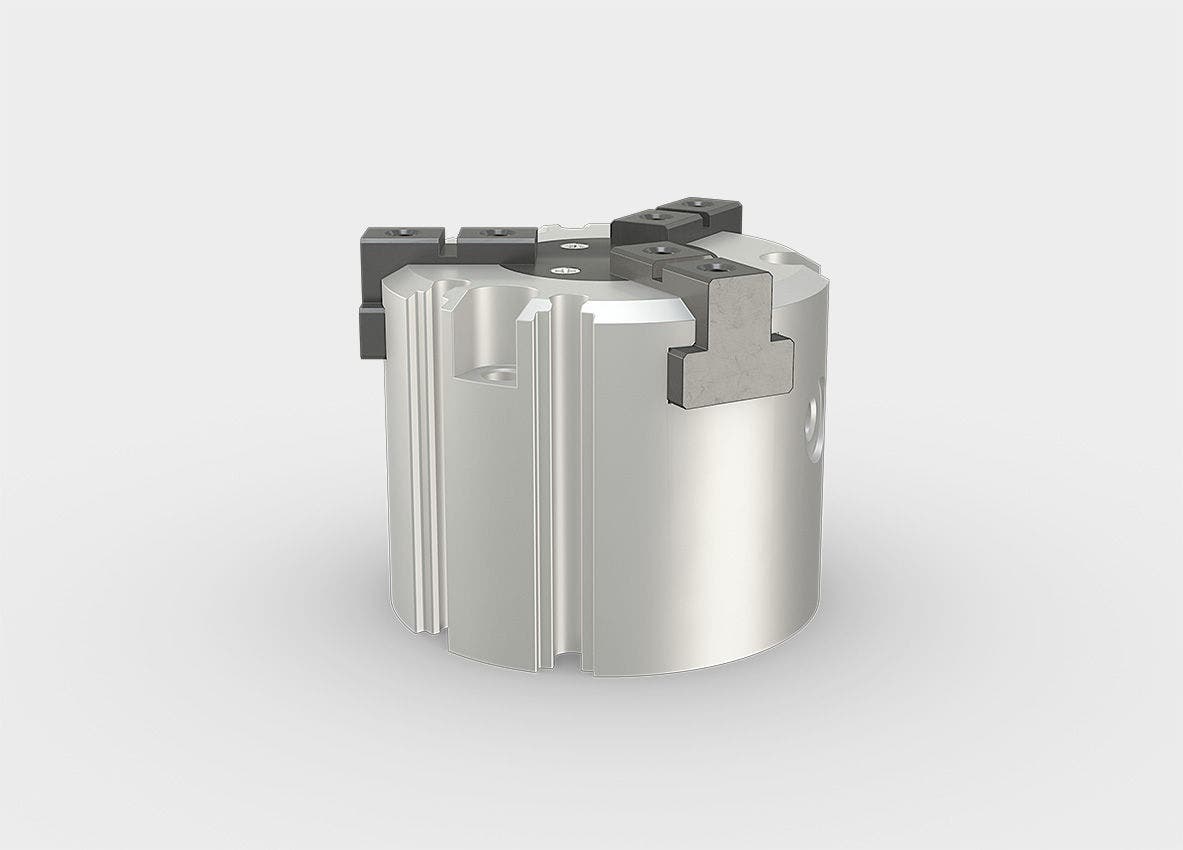
La pinza de 3 dedos es capaz de agarrar los componentes en tres puntos de contacto, lo que permite una recogida y colocación especialmente precisas y estables. Los componentes redondos son una de las razones típicas para utilizar este tipo de pinzas.
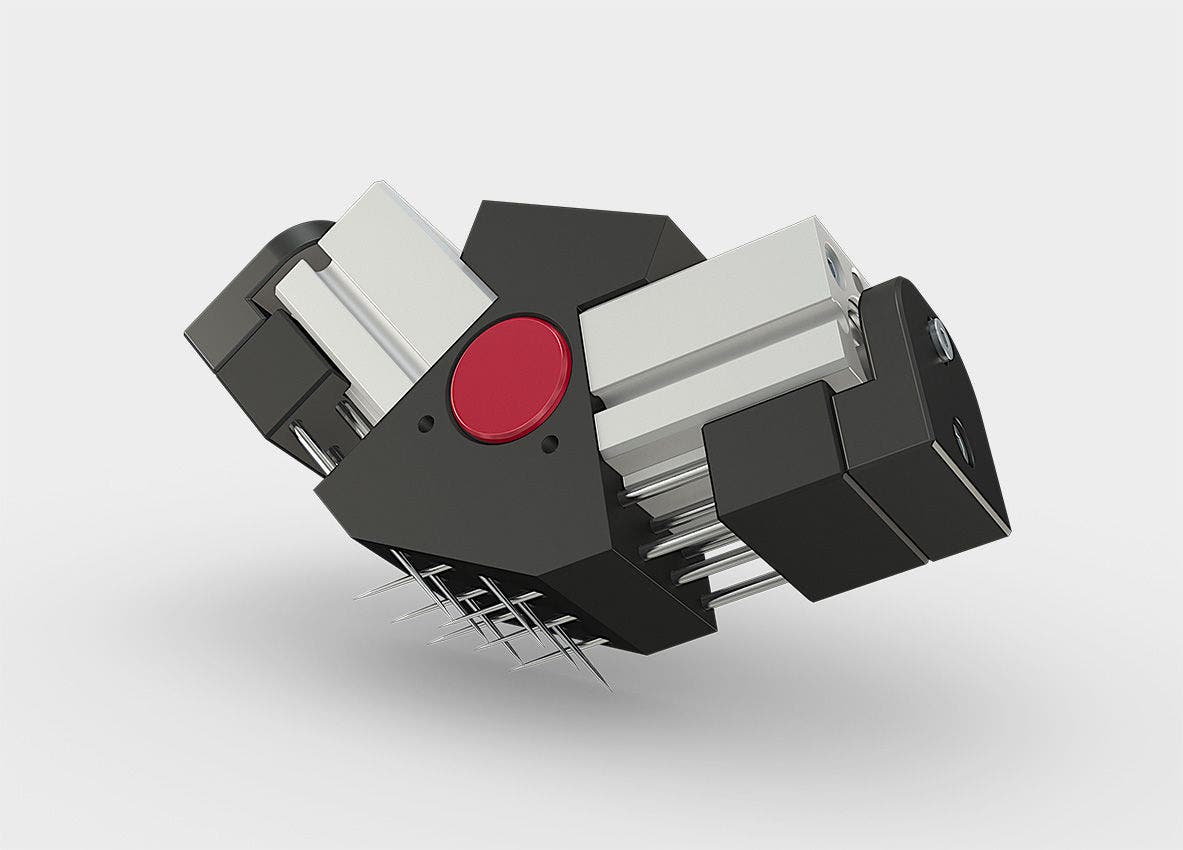
Las pinzas de aguja se utilizan para sujetar de forma segura objetos porosos, sensibles o difíciles de recoger mediante succión. Una pinza de agujas tiene varias agujas que pueden extenderse y retraerse para sujetar un objeto de forma segura. Este tipo de pinza se utiliza a menudo en las industrias textil y electrónica para manipular materiales sensibles como telas, materiales compuestos de fibra, placas de circuitos o cables.
Las pinzas internas son efectores finales que pueden agarrar y agarrar objetos de las superficies internas. Una pinza interna consiste en mordazas especializadas que se abren y cierran, o de lo contrario utiliza un elemento de expansión que se hincha utilizando un medio bajo presión. Esto permite sujetar un objeto desde el interior mientras se mantiene suficiente contacto con las superficies internas del objeto. Las pinzas internas se utilizan a menudo para recoger y mover objetos con cavidades cilíndricas o rectangulares, como tuberías.

Al seleccionar una pinza adecuada, los usuarios tienen acceso a una amplia cartera de varios tipos de pinzas. Para la mayoría de los requisitos típicos de los clientes, existe una herramienta de extremo de brazo adecuada.

La succión se ha convertido en una parte integral de la robótica moderna. Al igual que las mordazas de agarre, las puntas de succión al vacío se utilizan principalmente para recoger y mover objetos. Aquí, uno o más canales transmiten una fuerza de succión que mantiene el objeto a la punta de la aspiradora en un sello hermético.
Las pinzas de vacío robóticas tienen un diseño plano o cuentan con fuelles de goma y se utilizan para una vertiginosa gama de tareas de manipulación. Las aplicaciones típicas son la manipulación de chapa o vidrio, la recogida de cajas deformables o blandas en la industria del embalaje o el procesamiento de productos alimenticios.
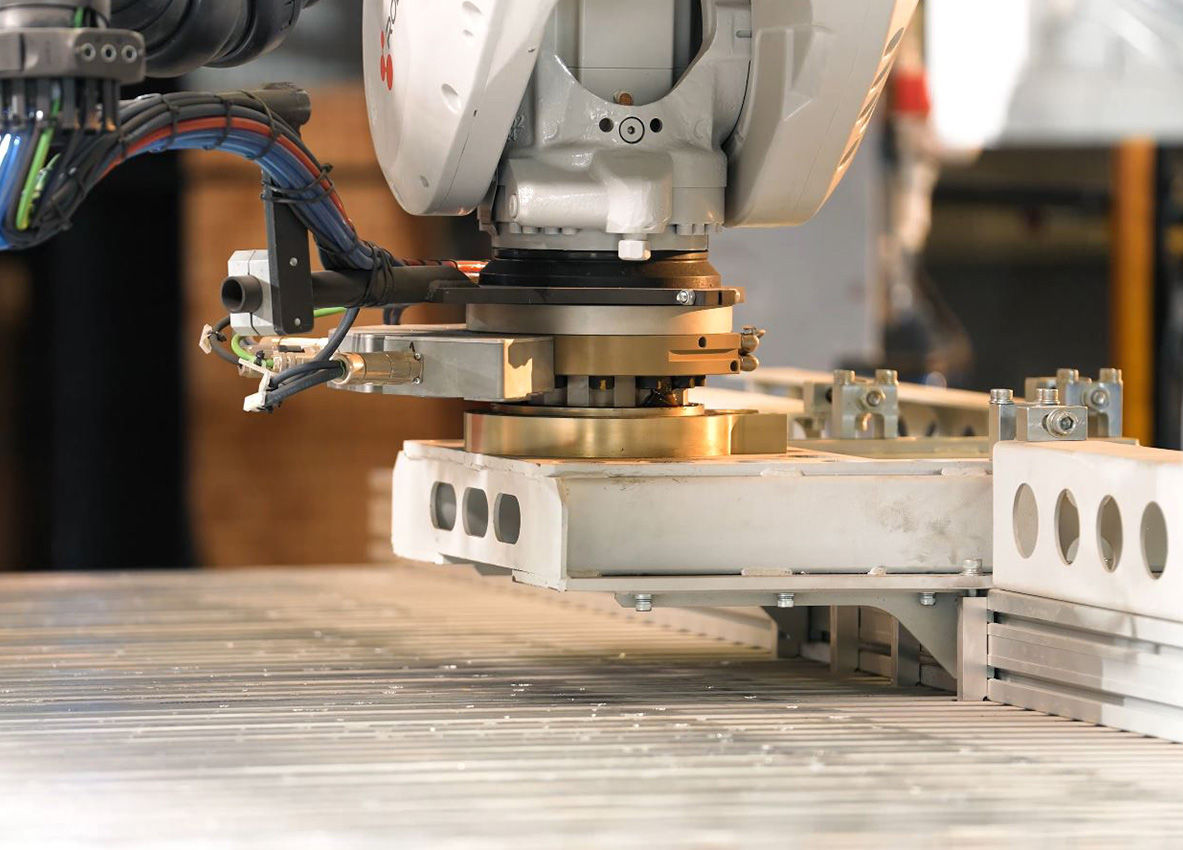
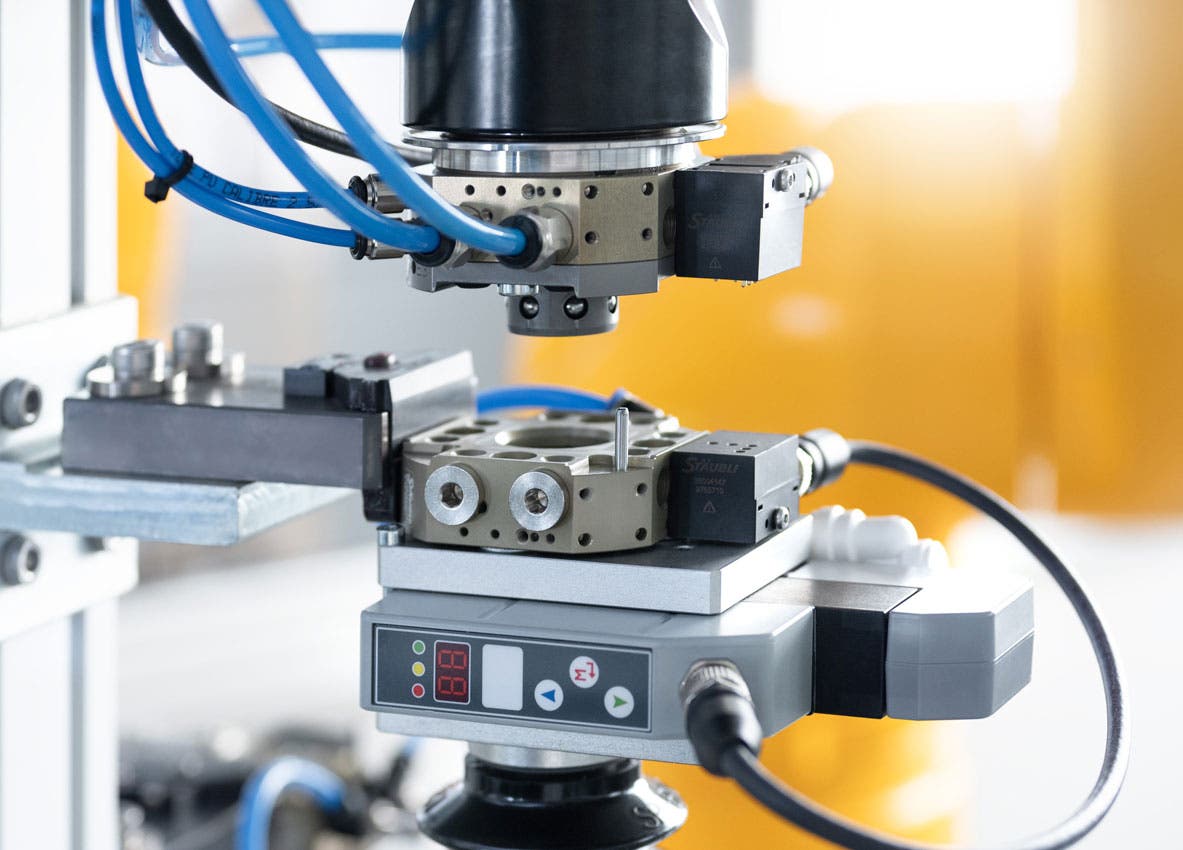
Los cambiadores de herramientas permiten cambiar entre una amplia gama de efectores finales robóticos de manera eficiente. En tal situación, el sistema de cambiador de herramientas EOAT puede ser manual o automático. Los sistemas de cambiadores de herramientas amplían considerablemente el espectro de aplicaciones de los robots. Por lo tanto, son más comunes en aplicaciones robóticas que involucran muchas tareas diferentes.
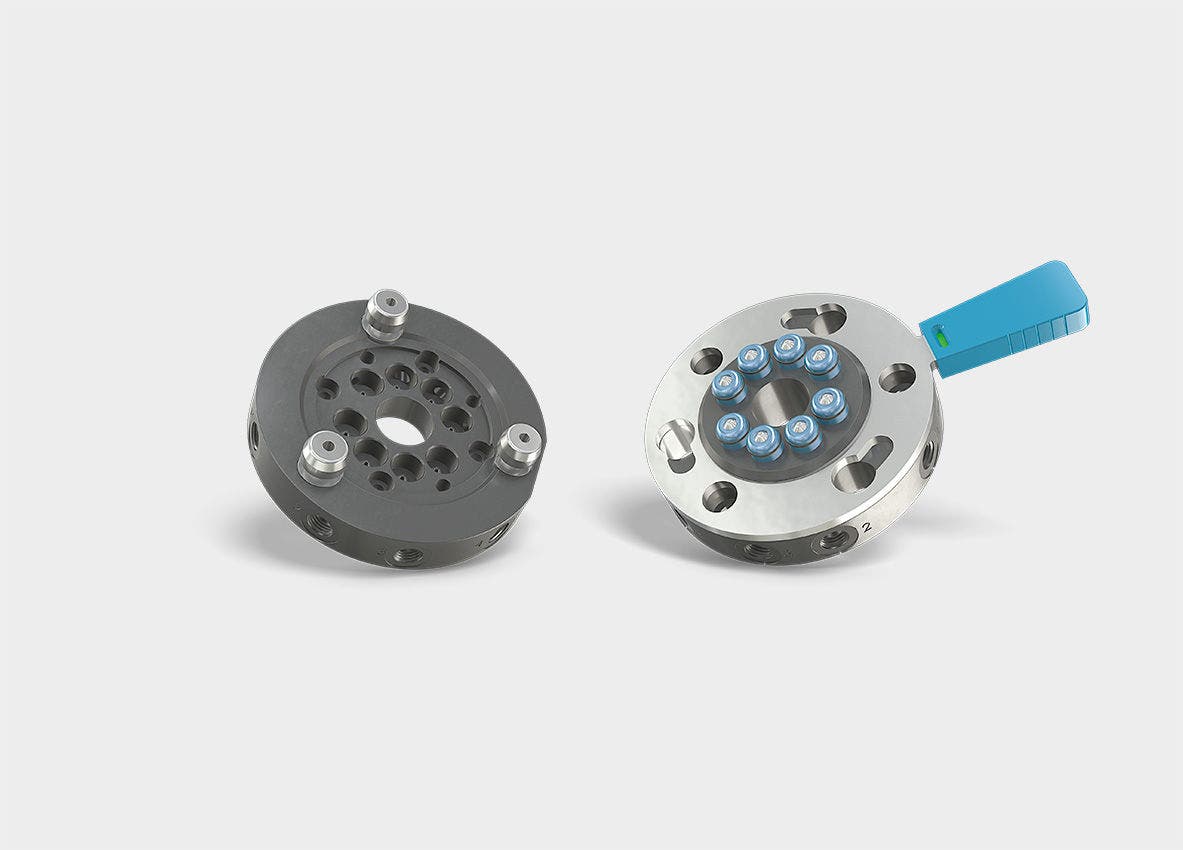
Los cambiadores de herramientas están situados en la interfaz entre la muñeca (brida) del robot y el efector final. Por esta razón, los cambiadores de herramientas deben calibrarse con precisión según los requisitos tanto del robot como de la herramienta. Además, los cambiadores de herramientas también transmiten señales eléctricas, datos, agua, aire comprimido, medios de soldadura y servofuerza.
Los cambiadores automáticos de herramientas robóticos (ATC) permiten la conmutación automática entre diferentes efectores finales de proceso. Esto permite aumentar el grado de automatización, aumentar la productividad y reducir los costes de personal al mismo tiempo. Un sistema automático de cambio de herramientas es particularmente útil cuando las herramientas deben cambiarse con frecuencia durante el proceso.

Las pinzas angulares son capaces de agarrar componentes en un ángulo definido. Las mordazas de este tipo de sistema de pinzas no son paralelas, sino que están inclinadas. Esto permite agarrar componentes que son más delgados hacia atrás o sujetar componentes.
Los robots se utilizan para soldar en numerosas industrias, especialmente en la industria automotriz. El uso de soluciones EOAT permite automatizar la mayor parte del proceso de soldadura, permitiendo soldaduras de alta calidad con tiempos de ciclo mínimos. Las aplicaciones EOAT se utilizan comúnmente para la soldadura por puntos.
Las soluciones EOAT son adecuadas para la manipulación física de componentes, la inspección y el control de calidad. Aquí se utilizan cámaras, sensores de ultrasonido, sensores infrarrojos, escáneres láser y otros sistemas similares para inspeccionar piezas.
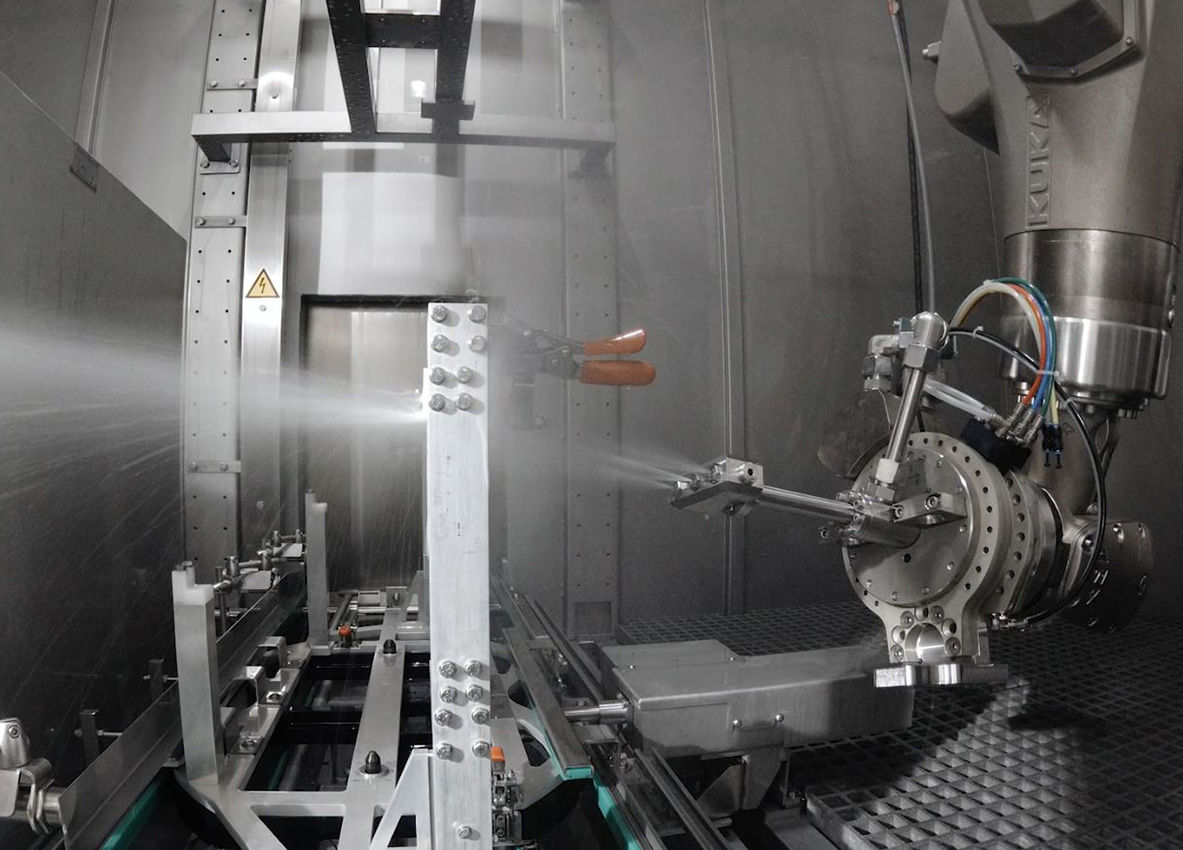
Las herramientas de fin de brazo también se utilizan para la fabricación sustractiva, principalmente en las industrias metalúrgica y de procesamiento de plásticos. Las aplicaciones típicas incluyen taladrado, corte, desbarbado y rectificado de componentes.
Hay varios aspectos técnicos y económicos a tener en cuenta al desarrollar, implementar y operar herramientas de fin de brazo para sistemas robóticos. Estos son, en particular, los siguientes desafíos:
El diseño de sistemas EOAT modernos requiere un profundo conocimiento de la robótica, especialmente con aplicaciones que requieren alta precisión o velocidad. La herramienta de fin de brazo debe adaptarse con precisión a la aplicación, teniendo en cuenta las especificaciones del peso y la forma de los componentes, los sistemas de accionamiento y los controladores, las limitaciones espaciales y otros aspectos.
Dependiendo de la aplicación, la implementación de soluciones EOAT puede ser bastante costosa. Por lo tanto, antes de invertir en herramientas de fin de brazo, es aconsejable elaborar un cálculo detallado de la viabilidad económica. Las ganancias tanto en los ingresos como en los resultados resultantes de los aumentos de eficiencia y la reducción de los requisitos de personal deben equilibrarse con los costos iniciales y los costos generales de la implementación de soluciones EOAT.
Los sistemas EOAT suelen contener muchas piezas móviles que experimentan un proceso de desgaste natural. Por lo tanto, al integrar las herramientas de fin de brazo en el proceso de fabricación, debe intentar elegir componentes de bajo desgaste que puedan reemplazarse rápidamente cuando sea necesario. Esto mantendrá los costes de servicio y mantenimiento al mínimo.
La integración de la herramienta de fin de brazo en el sistema robótico y en el entorno de fabricación más amplio debe considerarse ya en la fase de diseño. Al hacerlo, todos los sistemas de componentes deben coordinarse cuidadosamente entre sí y garantizar la compatibilidad. La integración del sistema no solo se refiere a los parámetros físicos del brazo robótico, el cambiador de herramientas y el EOAT, sino que también tiene implicaciones para las especificaciones del software y el controlador.
Al implementar herramientas de fin de brazo, la seguridad es siempre la máxima prioridad. Esto es especialmente cierto en los sistemas de cobots, donde las personas y los robots trabajan codo con codo. En este caso, es necesario tomar precauciones de seguridad para prevenir accidentes laborales. Entre ellos se encuentran, por ejemplo, sensores para la supervisión de procesos y dispositivos de apagado automático.
Gracias a sus numerosas ventajas, los sistemas EOAT se han convertido en un pilar de la industria manufacturera. Los efectores finales robóticos modernos no solo permiten diseñar procesos de fabricación con mayor precisión y eficiencia, sino que también aumentan notablemente los estándares de seguridad industrial y calidad del producto. En un entorno económico globalizado, EOAT tiene el potencial de mejorar de manera sostenible su competitividad en la producción.
La implementación de soluciones EOAT versátiles y flexibles permite adaptar rápidamente los procesos de producción a los nuevos requisitos, y el aprovechamiento del principio de modularidad le permitirá hacer un uso eficiente de los sistemas robóticos disponibles. Por ejemplo, un solo robot puede completar una amplia gama de tareas sin intervención humana, gracias a un cambiador de herramientas adecuado y herramientas de fin de brazo.
Hoy en día, los sistemas robóticos modernos con soluciones EOAT muestran sus puntos fuertes en numerosas aplicaciones. Entre ellos se encuentran las máquinas de montaje, manipulación de materiales, alimentación y descarga, así como los componentes de recogida, embalaje, paletización, soldadura y taladrado.

Nuestros temas sirven como su recurso integral para comprender el papel fundamental de los cambiadores de herramientas robóticas en la mejora de la eficiencia en una multitud de aplicaciones.
Stäubli es una empresa tecnológica líder en la construcción y el desarrollo de soluciones de sistemas robóticos de cambio de herramientas.
Descubra la versatilidad y eficiencia de los avanzados sistemas robóticos de cambio de herramientas de Stäubli descargando nuestras vitrinas de soluciones innovadoras.