- Europe
- Americas
- Asia and Middle East
- Africa and Oceania
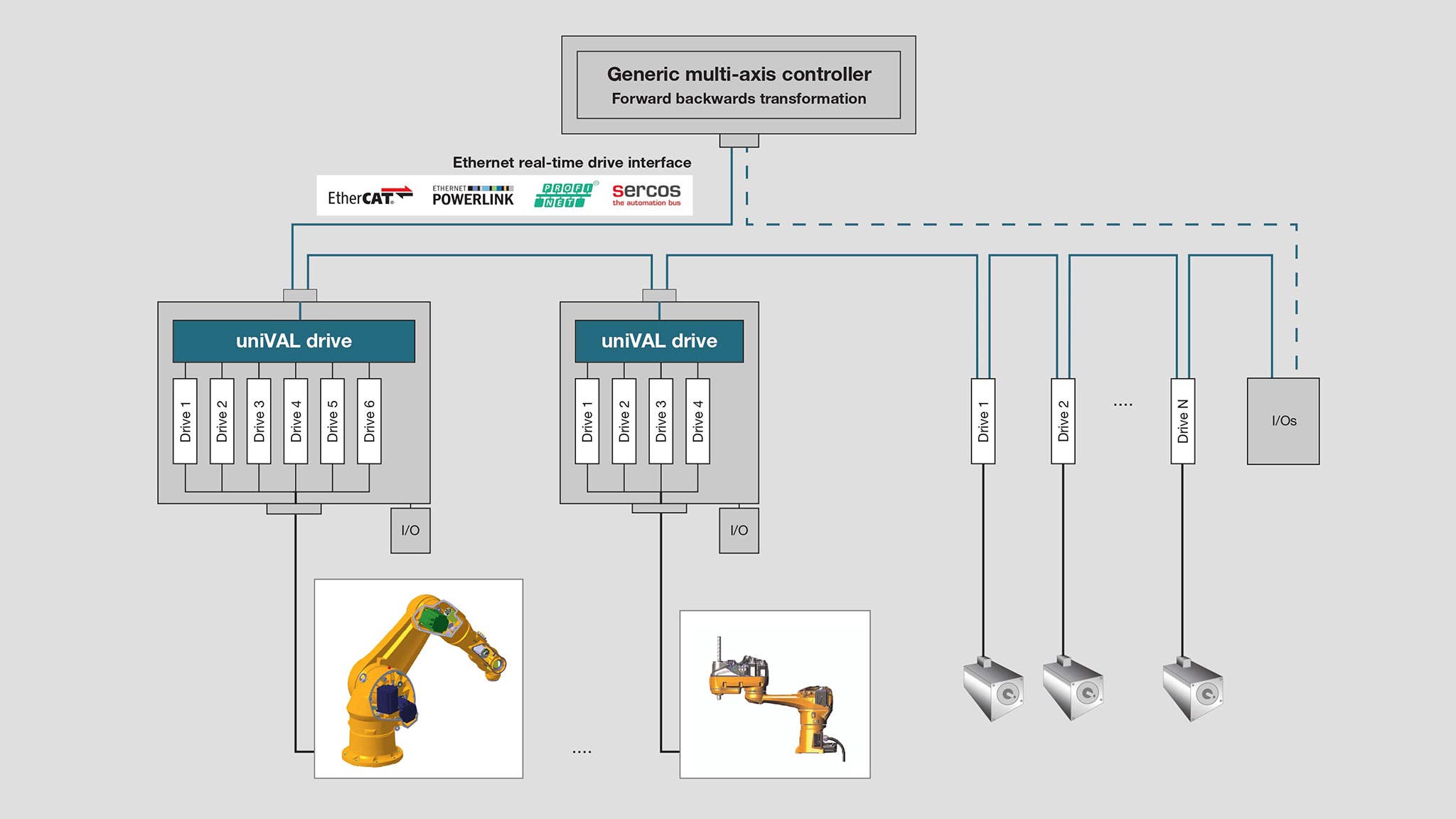
uniVAL drive is a “ready to plug” solution to drive Stäubli’s entire range of 4 and 6 axis robots with generic industrial multiaxis controllers.
uniVAL drive eases the integration of Stäubli robots and makes the procedure simpler and faster than ever before – saving time, costs and resources.
uniVAL drive meets machine builders’ need for a robot control, fully compliant with the existing industrial multi-axis control interface. Machine builders are now able to drive a Stäubli robot as a standard machine suited for a wide range of applications, with no need for training on a new development environment. In addition, the human machine interface remains the same for the operator.

Easy to connect to state of the art real time Ethernet based field buses

Fully compatible with Stäubli standard services and maintenance tools

Cost efficient solution, no additional robot programming language knowledge required